
Our institute's latest research results were published in IJRR as the first unit
Recently, a paper on the latest research results of the Robotics Team of the School of Computer Science at Sun Yat-sen University (team led by Associate Professor Tan Ning and Professor Huang Kai) was published in the top robotics journal International Journal of Robotics Research under the title “Behavior-predefined adaptive control for heterogeneous continuum robots” . This paper is the first IJRR article of Sun Yat-sen University with the first unit. The first authors of the paper are Associate Professor Tan Ning and doctoral student Yu Peng from the School of Computer Science of Sun Yat-sen University. This research result not only provides new ideas for the development of control technology of continuum robots, but also provides valuable reference and reference for researchers in related fields.
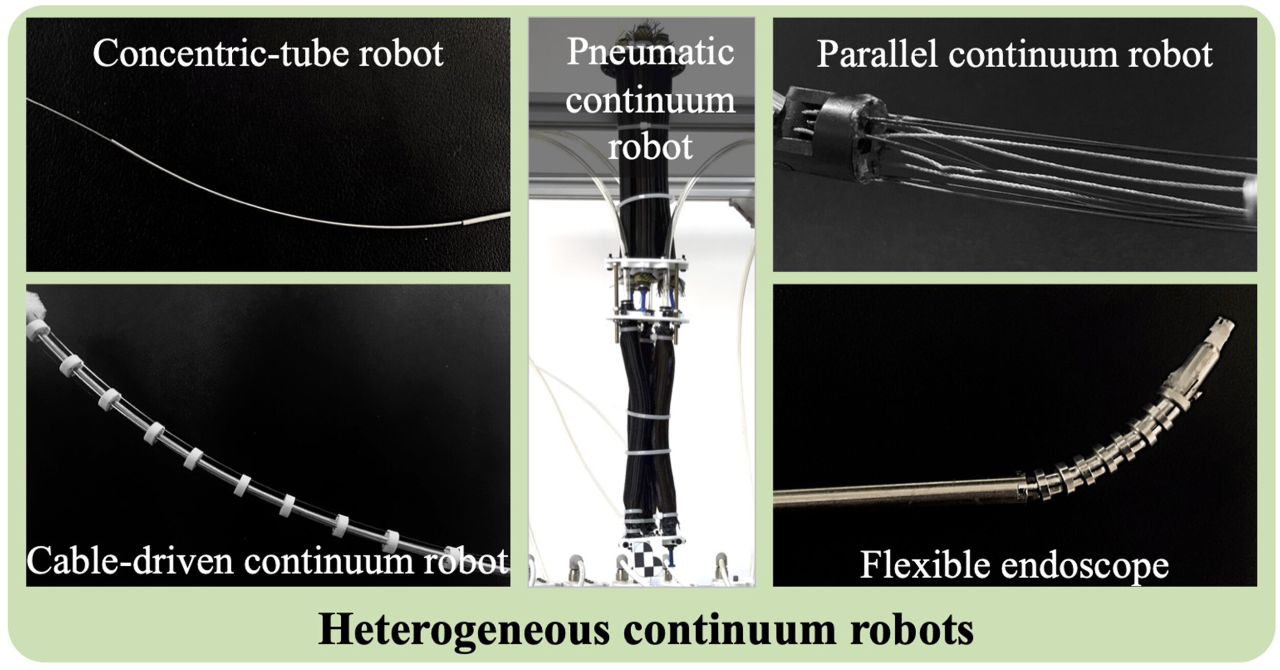
Continuum robots made of elastic materials can not only withstand continuous deformation, but also move freely in complex environments. With their flexibility, toughness and high interactive safety, they show great application potential and broad market prospects in many fields such as medical and industrial applications, and have therefore become a research hotspot.
However, this emerging technology also faces considerable challenges. The control technology of continuum robots is still in the exploratory stage and many technical problems remain to be solved. Due to the particularity of the structure of this type of robot, how to develop accurate and efficient control algorithms for it has become the key to the development of the industry. In order to achieve the optimal performance of the continuum robot, it is particularly important to develop an effective, accurate and stable control system.
▍Focus on HCR and propose BPAC control system
Currently, there are two main challenges facing continuum robot control: first, traditional control methods often find it difficult to achieve ideal task space performance. For example, they have shortcomings in convergence time and error control, and usually require tedious parameter fine-tuning. Second, due to the diversity of robot types, developing a universal control system becomes extremely complicated. Different robots may require different control models, which undoubtedly increases the cost and time of research and development.
To address these issues, a research team from Sun Yat-sen University conducted an in-depth study on the task space behavior and general control of heterogeneous continuum robots (HCRs). Recently, they successfully developed a new controller that can achieve precise motion control and visual servoing of continuum robots without the need for tedious parameter adjustments. At the same time, the study also innovatively integrated the velocity-level kinematic mapping estimator and successfully constructed a model-free control system, thereby further improving the adaptability and flexibility of the control. In addition, the research team proposed a rescalable performance function to ensure the effectiveness and robustness of the proposed control system in the presence of external disturbances.
Unlike most previous studies, this team's research focus is not limited to the design, perception, modeling and control of a specific robot, but rather looks at the general motion control of various types of HCRs . This shift in research perspective not only broadens the application scope of continuum robot control technology, but also brings a new dimension of thinking to the industry.
It is worth mentioning that this study introduced the PPC theory into the task space control of continuous robots for the first time, achieving innovation in theoretical application. At the same time, in order to enhance the stability and anti-interference ability of the control system, the team also creatively proposed new performance functions and refined the PPC theory.
▍Behavior preset controller
In past studies, the motion control methods of continuum robots can be mainly divided into three categories: model-based, adaptive, and data-driven. Although these methods have their own advantages, they also have obvious shortcomings. Although adaptive methods can quickly adapt to different robot platforms, most of them have only been verified on a single robot and lack research on their wide applicability. Although model-based or data-driven methods have been tested on some continuous robots, their versatility and performance still need to be improved.
Although configuration space PPC has been studied, the exploration of task space PPC is still blank. To achieve the desired task space performance, existing control methods often require fine tuning of control or modeling parameters. Some studies can set the convergence time of task space errors, but few studies pay attention to transient errors and steady-state errors.
To make up for the shortcomings of existing methods, the research team creatively proposed a new general control system - the BPAC system. The significant advantages of the BPAC system are the predefinability of its task space performance and its rapid adaptability to various types of continuum robots. Before using the BPAC system to operate the continuum robot, the user only needs to preset the desired performance parameters.
When building the BPAC system, the research team first designed a behavioral preset controller. This controller is designed to enable a continuous robot to accurately reach a reference point or trajectory when performing a motion task and complete the task within a predetermined time.
To achieve this goal, the team applied performance preset control (PPC) theory, which allows the user to specify the transient error convergence rate and boundaries. Given that existing PPC methods are mostly applicable to ideal conditions without external interference, and continuous robots are susceptible to deformation caused by external loads or environmental interactions, the team introduced the zeroing dynamics method and used sensor feedback to estimate model information to eliminate model uncertainty. The team used this method to initialize and adapt the robot's unknown Jacobian matrix to optimize motion control.
Furthermore, by combining a simple initialization step and a zeroed dynamics model, the team simplified the operation of the controller and avoided complex modeling and uncertainty issues. Ultimately, the controller achieves precise motion control and visual servoing of the continuum robot, allowing the user to predefine the robot's task behavior and performance while ensuring that the drive signal meets spatial constraints and protects the robot's actuators.
▍Speed-level kinematic mapping estimator
In the field of robotics, the motion control of continuum robots has always been a difficult research topic. When these robots interact with external loads or are in a changing environment, they often undergo unpredictable deformations, making it difficult for traditional control methods based on preset models to cope with them.
Model-free or adaptive control strategies use real-time sensor feedback to estimate model information and dynamically adjust control parameters, thereby cleverly solving the problems caused by model uncertainty and are therefore highly favored by researchers.
In this study, in order to get rid of the dependence on the precise model information of the robot, the research team cleverly introduced the zeroing dynamics method to accurately estimate the velocity-level kinematic model of the continuum robot. Zeroing dynamics, a technology specially designed to solve various time-varying problems, can deeply analyze the dynamic characteristics of the system, and then accurately predict and control the motion state of the robot.
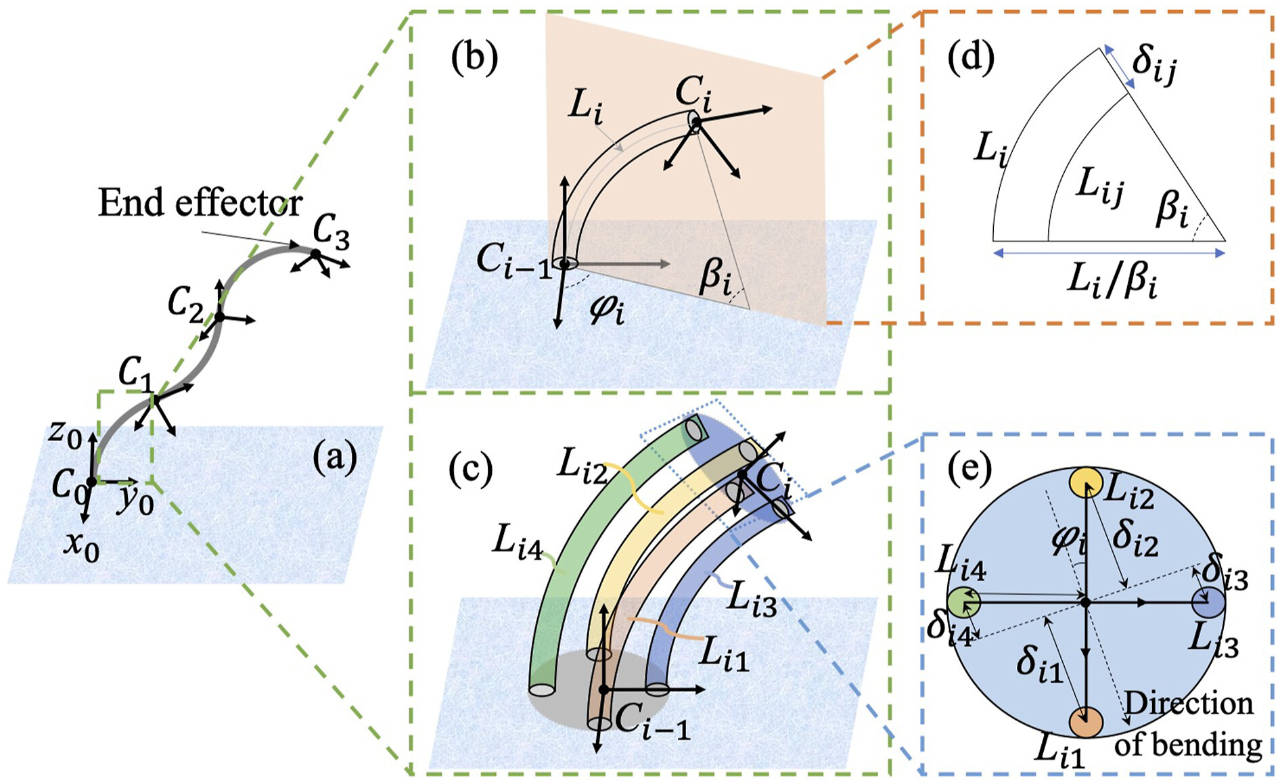
During the implementation process, the research team first clearly defined the state vectors of the task space and the drive space, and gave the form of the forward kinematics model. The model can clearly reveal the complex nonlinear relationship between the actuation state and the position and orientation of the robot end-effector. Next, by calculating the derivative of the task space velocity vector with respect to the drive state vector, the representation method of the Jacobian matrix, which is indispensable for realizing adaptive control, is obtained.
During the experimental verification phase, the research team used actual drive input and task space output data to accurately initialize the Jacobian matrix to ensure its accuracy. Taking into account the changes in the Jacobian matrix caused by the deformation of the robot during the task execution, they used the zeroing dynamics method to online estimate and adjust the estimated value of the Jacobian matrix.
Finally, under the guidance of the zeroing dynamics theory, the research team successfully estimated the velocity-level motion model of the continuum robot through a series of carefully designed steps, including defining the task and drive space state vectors, establishing a forward kinematics model, deriving the velocity-level motion model, model initialization, and online updating. This important achievement enables them to accurately predict and effectively control the motion state of the continuum robot when performing tasks.
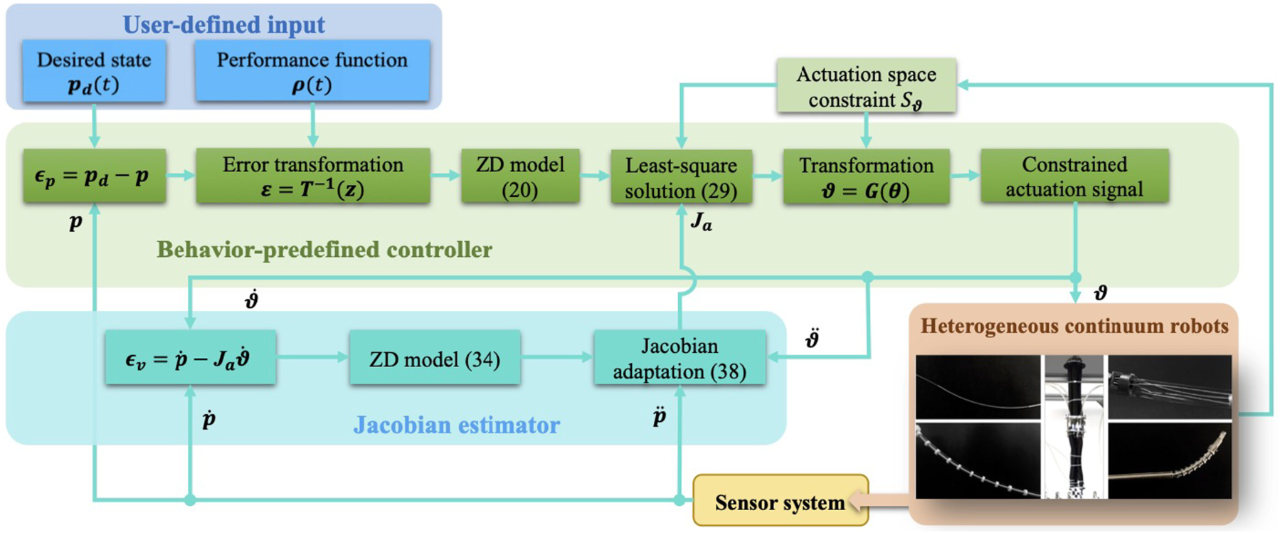
By combining the new controller with a velocity-level kinematic mapping estimator, the research team successfully developed an efficient model-free control system. This system not only reduces the reliance on precise robot model information, but also significantly improves the adaptability and flexibility of the control system through real-time feedback and adjustment of model parameters, opening up new possibilities for the application of continuum robots in complex and changing environments.
▍Re-adjustable performance function RePF
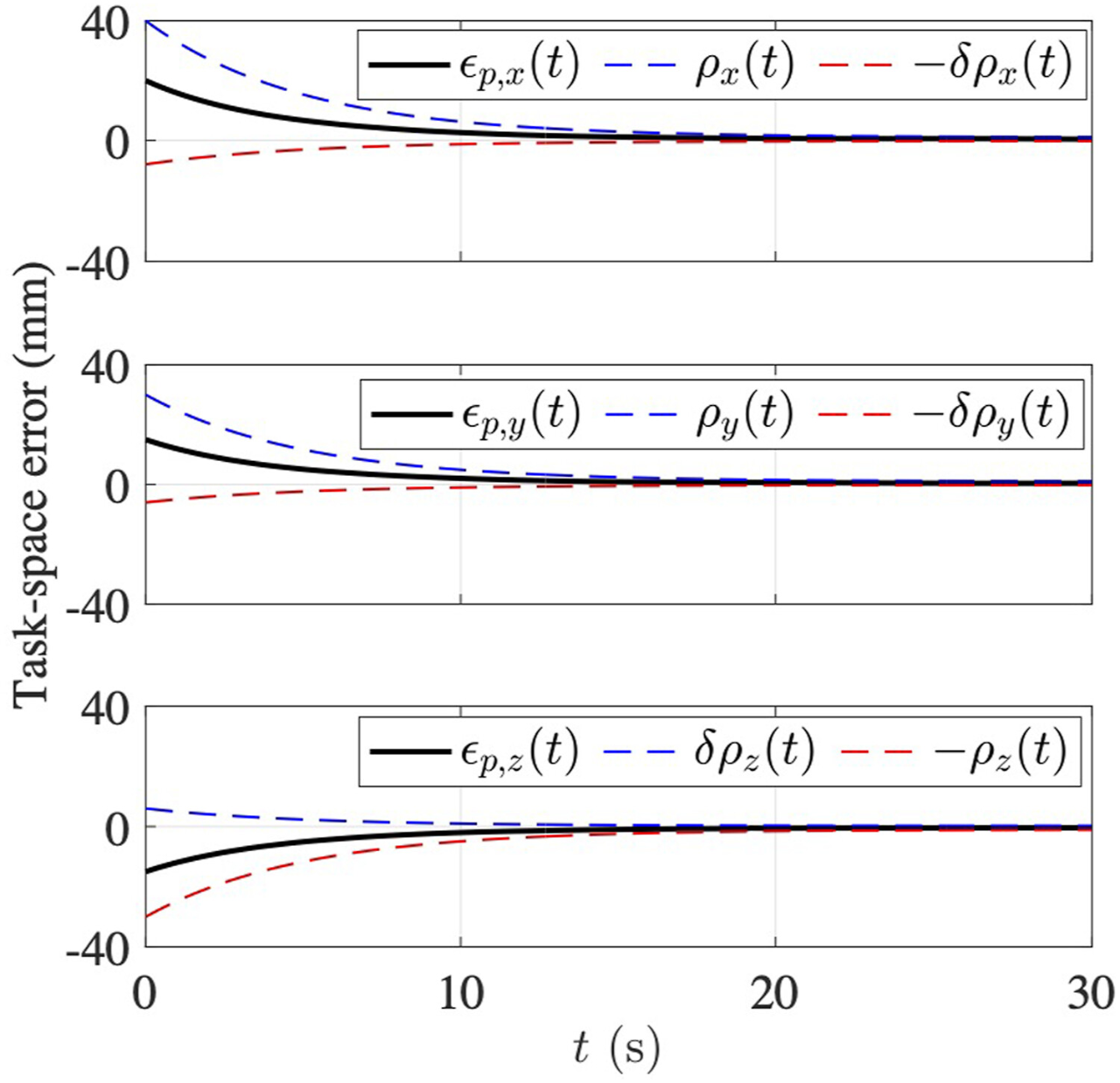
In order to improve the stability, robustness and resistance to external interference of the control system, the research team also proposed a new re-adjustable performance function RePF. The introduction of this function effectively ensures that the task space error can be maintained within the boundaries set by RePF.
Although traditional performance functions such as the exponential performance function (EPF) can theoretically make the task space error converge exponentially to a certain upper bound, in practical applications, due to the limited task execution time, the EPF takes too long and is impractical. Although the predefined time performance function (PPF) can directly specify the time required for the performance function and task space error to converge to arbitrarily small values, its performance is often greatly reduced when faced with uncertainty and external interference.
To overcome these limitations, the research team creatively proposed RePF. This function combines PPF with an adjustment term for task space error to achieve dynamic adjustment of performance boundaries. This design not only enables RePF to work like a soft bound constraint, but also helps to ensure the convergence and robustness of the control system in the presence of disturbances. Specifically, RePF can readjust its constraint boundaries when interference occurs, ensuring that the task space error always remains within the set boundaries, effectively avoiding the risk of control failure.
As an innovative performance function, RePF significantly enhances the stability and robustness of the robot control system in the face of external disturbances by dynamically adjusting the performance boundary, providing strong support for the application of robotics in complex and changing environments.
▍BPAC control system feasibility test
In order to verify the effectiveness of the proposed BPAC control system, the research team conducted a series of detailed experimental verifications.
In preliminary tests, the research team used a simulation robot based on PCC theory to evaluate the effectiveness of the Jacobian matrix adaptation rule. They controlled a two-stage continuous contour robot (CCR) to perform a circular path following task and compared the situation with and without Jacobian adaptation. The experimental results show that without the adaptive law, the actual motion trajectory of the robot end effector deviates significantly from the reference path; after enabling the adaptive law, the robot can move accurately along the reference path.
To further explore the impact of control frequency on experimental results, the team manipulated CCR at different control frequencies in a simulation environment to complete the five-pointed star path tracking task. Experimental data show that reducing the control frequency will lead to longer convergence time, slower end-effector speed and larger residual error. In addition, low-frequency control also weakens the system's ability to handle significant external disturbances, making the recovery of task space errors slower after disturbances.
In one specific experiment, the CCR was asked to trace a five-pointed star path within a workspace with its end effector. The task lasted 180 seconds and the control frequency was 10 Hz. By adopting the predictive performance filter (PPF) and setting a convergence time of 10 seconds, the experimental results show that both the performance function and the task space error converge to the set value within the expected 10 seconds. It is worth mentioning that the steady-state error of the end effector along the reference path is less than 2 mm. This result strongly confirms the feasibility of the BPAC control system in achieving the predetermined task space performance of the continuous robot.
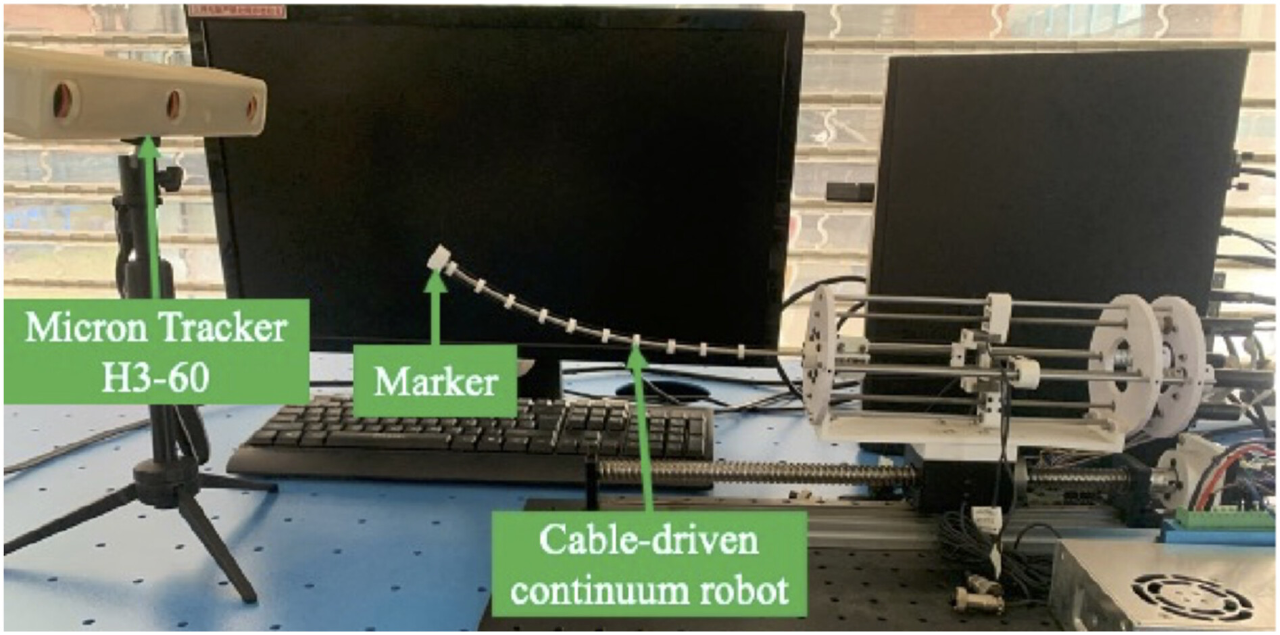
Finally, to verify the performance of the BPAC control system in practical applications, the research team conducted physical experiments using five different types of HCRs in a laboratory environment. The experimental setup includes a robot, a high-precision camera, and a personal computer. The position of the robot end effector is precisely measured by a camera and operated at a control frequency of 10 Hz. Experimental results show that the control system can effectively cope with signal transmission delay and computational overhead and achieve efficient control. In addition, the initialization process of the Jacobian matrix is extremely fast and can be completed within seconds, further improving the practicality of the system.
Through a series of rigorous experimental verifications, the research team successfully confirmed the feasibility and efficiency of the BPAC system and its Jacobian matrix adaptation law, providing strong support for the precise control of continuous robots in complex tasks.
Reference article:
https://doi.org/10.1177/02783649241259138
Reprinted from: Robot Lecture Hall
Edited by: Tan Xuyan, Xu Ying
First review: Wang Dongmei
Reviewed by: Zheng Weishi, Yan Xiaohui
Review and release: Ma Xiao



