

Research Areas
- Robotics (Intelligent robots, Intelligent control, Medical robotics, Multi-robot cooperation, Bio-inspired robotics)
- Artificial Intelligence(Embodied AI, ML/DL, Multimodal Large Models, World Models, Brain-inspired computing, Machine vision)
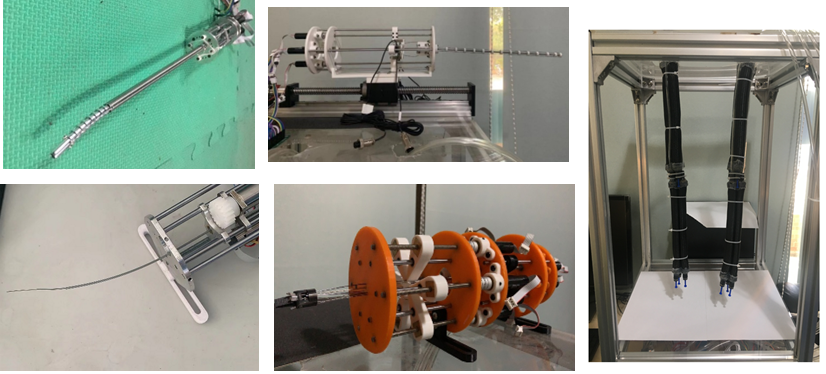
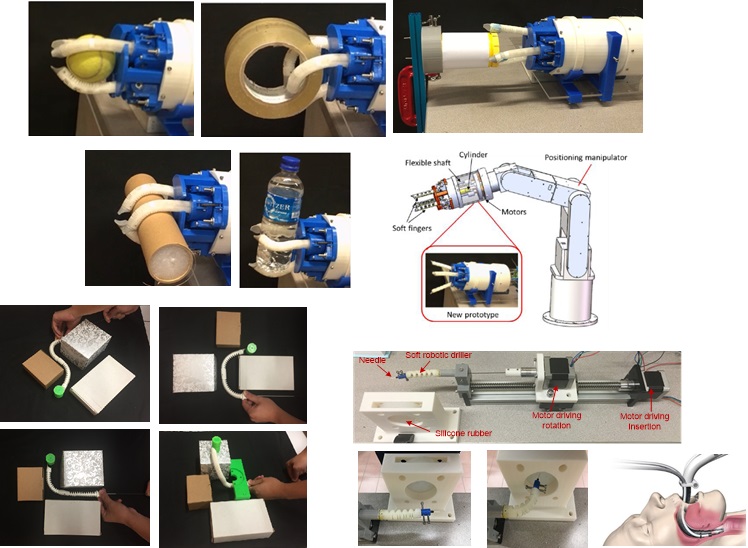
Robotic platforms

Professional Experience
2026/01-Now: Sun Yat-sen Univeristy(SYSU),Professor
2018/09-2026/01: Sun Yat-sen Univeristy(SYSU),Associate professor
2018/02-2018/09: Singapore University of Technology and Design(SUTD),Research Fellow
2016/05-2017/11: National University of Singapore(NUS),Research Fellow
2014/05-2016/05: Singapore University of Technology and Design(SUTD),Postdoctoral Research Fellow
2010/05 - 2013/12: CNRS Femto-st Institute/Université Marie et Louis Pasteur,France,PhD candidate/Research associate
Awards
World's Top 2% Scientists
Best Paper Award,International Conference on Advanced Computing and Intelligent Robotics Applications (ACIRA 2025)
Best Paper Nomination Award,International Conference on Intelligent Robotics and Automatic Control (IRAC 2024)
Robotica Best Paper Finalist,IEEE International Conference on Robotics and Biomimetics (ROBIO 2022)
Best Paper Award,The 4th International Symposium on Autonomous Systems (ISAS 2020)
Representative Papers
[TRO-25] Data-Efficient and Predefined-Time Stable Control for Continuum Robots, IEEE Transactions on Robotics (T-RO), 2025. (机器人三大顶刊)
[IJRR-25] Learning High-Fidelity Robot Self-Model with Articulated 3D Gaussian Splatting, The International Journal of Robotics Research (IJRR), 2025. (机器人三大顶刊)
[IJRR-25] On the Learning-based Control of Continuum Robots with Provable Robustness, Efficiency, and Generalizability, The International Journal of Robotics Research (IJRR), 2025. (机器人三大顶刊)
[IJRR-24] Behavior-Predefined Adaptive Control for Heterogeneous Continuum Robots, The International Journal of Robotics Research (IJRR), 2024. (机器人三大顶刊,中大首篇)
[TRO-15] Accuracy Quantification and Improvement of Serial Micropositioning Robots for In-Plane Motions, IEEE Transactions on Robotics (T-RO), 2015. (机器人三大顶刊)
[AUTO-25] Solving A Variety of Linear Time-Varying Systems of Equations with Prescribed Performance, Automatica, 2025. (控制领域顶刊)
[RSS-23] Predefined-Time Convergent Motion Control for Heterogeneous Continuum Robots, in Robotics: Science and Systems (RSS) XIX, Daegu, Republic of Korea, 2023. (机器人Top1顶会,中大首篇)
[BOOK-26] Neurodynamic Methods for Continuum Robot Control, ISBN: 978-1-394-40273-1, May 2026, Wiley-IEEE Press.
[RAL-26] Enhanced Soft Actuator with High Motion Potential and Multi-Drive Solutions via Bidirectional Motion and Reconfigurable Strategies, IEEE Robotics and Automation Letters, 2026.
[JFR-26] Single Master Bimanual Slaves Cooperative Teleoperation with Modified Damping Zeroing Neurodynamics, Journal of Field Robotics, 2026.
[JAS-26] Model-Free Variable Impedance Control of Redundant Manipulators for Soft Tissue Puncture, IEEE/CAA Journal of Automatica Sinica, 2026.
[TIE-25] Acceleration-Layer Robotic Control Based on Neural Dynamics, IEEE Transactions on Industrial Electronics, 2025.
[TMECH-25] Dexterity Online Optimization of Robotic Endoscopes Based on the Constrained Condition Number under RCM Constraints, IEEE/ASME Transactions on Mechatronics, 2025.
[TIE-25] Predefined-Time-Synchronized Whole-Body Control of Velocity-Controlled Mobile Manipulators With Unknown Kinematics, IEEE Transactions on Industrial Electronics, 2025.
[TII-25] A Hybrid Neurodynamic Scheme for Bimanual Synchronized Tracking Control of Robotic Manipulators with Uncertain Kinematics, IEEE Transactions on Industrial Informatics, 2025.
[TETCI-25] Genetic-Algorithm-Optimized Fuzzy Zeroing Dynamics for Visual Servoing of Robot-Camera Systems Without Modeling and Calibration, IEEE Transactions on Emerging Topics in Computational Intelligence, 2025.
[CAAI-25] Distributed Formation Control for Heterogeneous Robot Systems Based on Competitive Mechanism, CAAI Transactions on Intelligence Technology, 2025.
[SMB-25] Leveraging Part-Based NeRF for Robot Self-Modeling and Control, SmartBot, 2025.
[IROS-25] Iterative Learning Motion Control of Continuum Robots Based on Neural Ordinary Differential Equations, in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025.
[TSMCS-24] Multitarget Pursuit-Evasion Based on Distributed and Competitive Mechanisms, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024.
[TCDS-24] Unifying Obstacle Avoidance and Tracking Control of Redundant Manipulators Subject to Joint Constraints: A New Data-Driven Scheme, IEEE Transactions on Cognitive and Developmental Systems, 2024.
[TIE-24] Discrete Quad Neural Dynamics for Inverse-Free Control of Model-Unavailable Continuum Robots, IEEE Transactions on Industrial Electronics, 2024.
[ROBOT-25] 具身仿真器综述: 技术进展和未来展望,机器人, 2025.
[AAS-24] 基于大模型的具身智能系统综述,自动化学报, 2024. (入选知网高下载论文)
[AAS-24] 基于变参递归网络和递归最小二乘的连续体机器人控制,自动化学报, 2024.
[RAS-25] Model-Free Kinematic Control of Redundant Manipulators: A Passivity Perspective, Robotics and Autonomous Systems, 2025.
[RAS-25] A Competition-Based Scheme Using k-WTA Networks for Multi-Target Pursuit and Encirclement in Dynamic Environments, Robotics and Autonomous Systems, 2025.
[NEUNET-25] Liquid State Machine Gaussian Process, Neural Networks, 2025.
[ACIRA-25] GVI-SLAM: 3D Gaussian Splatting SLAM with An End-to-End Transformer VIO Frontend, in: 2025 International Conference on Advanced Computing and Intelligent Robotics Applications (ACIRA), Guangzhou, China, 2025. (Best Paper Award)
[IRAC-24] Causal Actions Recognition for Efficient Exploration in Robotic Reinforcement Learning, 2024 International Conference on Intelligent Robotics and Automatic Control (IRAC), Guangzhou, China, 2024. (Best Paper Nomination Award)
[TNNLS-23] Predefined-Time Convergent Kinematic Control of Robotic Manipulators with Unknown Models Based on Hybrid Neural Dynamics and Human Behaviors, IEEE Transactions on Neural Networks and Learning Systems, 2023.
[TII-23] Model-Free Synchronous Motion Generation of Multiple Heterogeneous Continuum Robots, IEEE Transactions on Industrial Informatics, 2023.
[TFS-23] A Fuzzy-Enhanced Robust DZNN Model for Future Multi-Constrained Nonlinear Optimization with Robotic Manipulator Control, IEEE Transactions on Fuzzy Systems, 2023.
[TIE-23] Cerebellum-Inspired Model-Free Tracking Control and Visual Servoing of a Rigid-Flexible Hybrid Robotic Endoscope with RCM Constraints, IEEE Transactions on Industrial Electronics, 2023.
[TMECH-23] Position-Based Visual Servo Control of Dual Robotic Arms with Unknown Kinematic Models: A Cerebellum-Inspired Approach, IEEE/ASME Transactions on Mechatronics, 2023.
[TCYB-23] Uncalibrated and Unmodeled Image-Based Visual Servoing of Robot Manipulators Using Recurrent Neural Networks, IEEE Transactions on Cybernetics, 2023.
[ROBIO-22] A Competition-Based Distributed Scheme for Solving Multi-Robot Cooperative Pursuit Problems, in: IEEE International Conference on Robotics and Biomimetics (ROBIO), Xishuangbanna, China, 2022. (Robotica Best Paper Finalist)
[EAAI-22] “Comparative Studies and Performance Analysis on Neural-Dynamics-Driven Control of Redundant Robot Manipulators with Unknown Models, Engineering Applications of Artificial Intelligence, 2022.
[TIE-22] Towards Unified Adaptive Teleoperation Based on Damping ZNN for Robotic Manipulators with Unknown Kinematics, IEEE Transactions on Industrial Electronics, 2022.
[TII-23] Data-Driven Control of Continuum Robots Based on Discrete Recurrent Neural Networks, IEEE Transactions on Industrial Informatics, 2023.
[TII-23] A Novel Discretized ZNN Model for Velocity Layer Weighted Multicriteria Optimization of Robotic Manipulators with Multiple Constraints, IEEE Transactions on Industrial Informatics, 2023.
[NEUNET-22] Recurrent Neural Networks as Kinematics Estimator and Controller for Redundant Manipulators Subject to Physical Constraints, Neural Networks, 2022
[JAS-22] A New Noise-Tolerant Dual-Neural-Network Scheme for Robust Kinematic Control of Robotic Arms with Unknown Models, IEEE/CAA Journal of Automatica Sinica, 2022
[TIM-22] New Varying-Parameter Recursive Neural Networks for Model-Free Kinematic Control of Redundant Manipulators with Limited Measurements, IEEE Transactions on Instrumentation and Measurement, 2022.
[TFS-22] A Dual Fuzzy-Enhanced Neurodynamic Scheme for Model-Less Kinematic Control of Redundant and Hyper-Redundant Robots, IEEE Transactions on Fuzzy Systems, 2022.
[TII-22] A Discrete Model-Free Scheme for Fault Tolerant Tracking Control of Redundant Manipulators, IEEE Transactions on Industrial Informatics, 2022.
[TCDS-22] A Cerebellum-Inspired Network Model and Learning Approaches for Solving Kinematic Tracking Control of Redundant Manipulators, IEEE Transactions on Cognitive and Developmental Systems, 2022.
[ISAS-20] Neural-Network-Based Control of Wheeled Mobile Manipulators with Unknown Kinematic Models, The 4rd International Symposium on Autonomous Systems (ISAS), Guangzhou, China, 2020. (Best Paper Award)
[NEUNET-20] Model-Free Motion Control of Continuum Robots Based on a Zeroing Neurodynamic Approach, Neural Networks, vol. 133, no. 2021, pp. 21-31, 2020.
[TASE-19] Pose Characterization and Analysis of Soft Continuum Robots With Modeling Uncertainties Based on Interval Arithmetic, IEEE Transactions on Automation Science and Engineering, 2019.
[MMT-18] Design, Characterization and Applications of a Novel Soft Actuator Driven by Flexible Shafts, Mechanism and Machine Theory, vol. 122, pp. 197-218, 2018.
[BOOK-16] Calibration of Micro-nanopositioning Robots, LAP LAMBERT Academic Publishing, 2016.
[AIC-16] Toward a Framework for Robot-inclusive Environments, Automation in Construction, vol. 69, pp. 68-78, 2016.
[RAL-16] Compressive Sensing-Based Metrology for Micropositioning Stages Characterization, IEEE Robotics and Automation Letters, 2016.
[ICRA-14] Characterization and compensation of XY micropositioning robots using vision and pseudo-periodic encoded patterns, in IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014.
[ICRA-13] Calibration of single-axis nanopositioning cell subjected to thermal disturbance, in IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013.


