

教师简介
教授,博士生导师,广东省杰出青年基金获得者,入选全球前2%顶尖科学家榜单,中山大学“百人计划”引进人才,IEEE高级会员。在法国国家科研中心攻读博士学位,之后在新加坡国立大学、新加坡科技与设计大学从事科研工作。主持和参与包括国家自然科学基金面上、省杰青、省面上、广州市重点研发、腾讯犀牛鸟等多个科研项目。研究围绕各类机器人与具身智能系统的建模、设计、优化、规划与控制,涵盖基础研究和应用开发。目前已发表上百篇论著,包括机器人和人工智能顶刊 IJRR(3篇)、T-RO(2篇)、Automatica、TMECH、T-ASE、JFR、RA-L、TNNLS、TFS、TCYB、TSMCS、TIE、TII、TETCI、TCDS、TIM、JAS等,机器人顶会RSS、ICRA、IROS等,以及英文专著2部和书中章节;授权发明专利10余项(美国专利一项);作为核心专家参与两项具身智能团体标准制定。研究成果获得了美国CNBC频道、EmTech世界新兴技术峰会、新加坡《海峡时报》、新加坡《联合早报》的广泛关注与报道。获得第五届中国机器人行业年会机器人技术突破奖,第十一届恰佩克奖年度杰出青年学者奖,广东省计算机学会青年科技奖,广东省人工智能产业协会青年科技创新奖,中国高校计算机研究生教育大会优秀论文一等奖,全省学校优秀教学成果奖(高等教育-研究生类)一等奖,中山大学第二届校级研究生教育教学成果奖特等奖,广东省计算机学会高等教育教学成果奖二等奖,ISAS2020和ACIRA2025的最佳论文奖,IRAC2024和ROBIO2022 的最佳论文提名奖。担任中国教育发展战略学会人工智能与机器人教育专委会理事,广东省工业软件学会具身智能专委会副主任委员,粤港澳大湾区人工智能产业智库专家,CAA混合智能专委会委员,广东省精准医学应用学会医疗机器人分会委员,入选《机械工程学报》、Robot Learning、SmartBot和Biomimetic Intelligence and Robotics (BIRob)期刊青年编委,《信息与控制》青年顾问团专家。
指导学生获:国家自然科学基金青年学生项目(博士生),CCF智能机器人专委会硕士学位论文激励计划,第十九届“挑战杯”全国大学生课外学术科技作品竞赛全国一等奖,海峡两岸暨港澳地区大学生计算机创新作品赛全国一等奖,iCAN大学生创新创业大赛大湾区赛区一等奖,第二十届中国研究生电子设计竞赛技术类竞赛华南赛区二等奖,广东省研究生学术论坛“智能制造与机器人”分论坛口头报告一等奖,粤港澳优秀研究生论文大赛一等奖,中山大学校级优秀本科毕业论文奖。
长期欢迎对机器人和人工智能感兴趣的博士、硕士研究生与各年级优秀本科生加入实验室,
长期招收自动化、计算机、机械、电子等领域的博士后。
研究领域
- 机器人 (智能机器人、智能控制、医疗机器人、多机器人协同、仿生机器人)
- 人工智能(具身智能、机器/深度学习、多模态大模型、世界模型、类脑计算、机器视觉及其与机器人的结合)
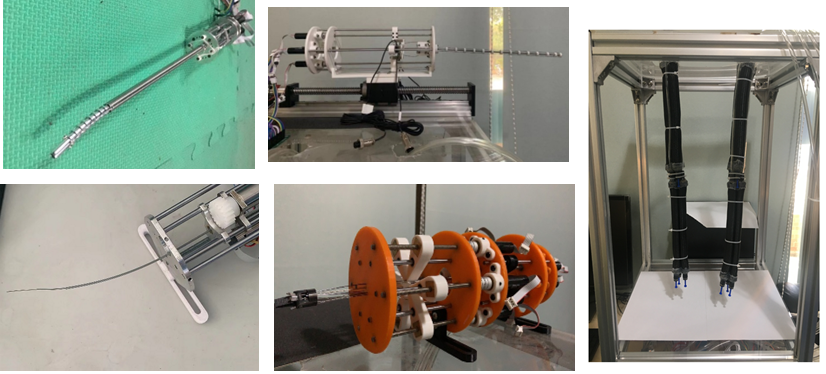
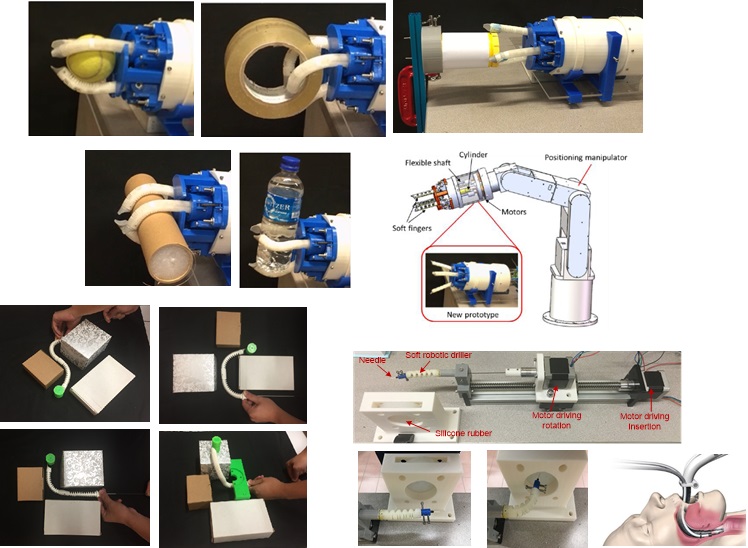
现有部分机器人研究平台

工作经历
2026/01至今:中山大学(SYSU),教授
2018/09-2026/01:中山大学(SYSU),副教授
2018/02-2018/09:新加坡科技与设计大学(SUTD),Research Fellow
2016/05-2017/11:新加坡国立大学(NUS),Research Fellow
2014/05-2016/05:新加坡科技与设计大学(SUTD),Postdoctoral Research Fellow
海外经历
2018/02-2018/09;新加坡科技与设计大学(SUTD),Research Fellow
2016/05-2017/11;新加坡国立大学(NUS),Research Fellow
2014/05-2016/05;新加坡科技与设计大学(SUTD),Postdoctoral Research Fellow
2010/05 - 2013/12;法国CNRS Femto-st研究所,博士生/研究助理
获奖及荣誉
广东省杰出青年基金获得者
入选全球前2%顶尖科学家榜单(World's Top 2% Scientists)
全省学校优秀教学成果奖(高等教育-研究生类)一等奖
中山大学第二届校级研究生教育教学成果奖特等奖
中国高校计算机研究生教育大会优秀论文一等奖
广东省计算机学会高等教育教学成果奖二等奖
第十一届恰佩克奖年度杰出青年学者奖
第五届中国机器人行业年会机器人技术突破奖
广东省计算机学会科学技术奖——青年科技奖
广东省人工智能产业协会科学技术奖——青年科技创新奖
Best Paper Award (大会最佳论文奖),ACIRA 2025
Best Paper Nomination Award(大会最佳论文提名),IRAC 2024
Robotica Best Paper Finalist (大会最佳论文提名奖),ROBIO 2022
Best Paper Award (大会最佳论文奖),ISAS 2020
代表性论著:
[TRO-25] Data-Efficient and Predefined-Time Stable Control for Continuum Robots, IEEE Transactions on Robotics (T-RO), 2025. (机器人三大顶刊)
[IJRR-25] Learning High-Fidelity Robot Self-Model with Articulated 3D Gaussian Splatting, The International Journal of Robotics Research (IJRR), 2025. (机器人三大顶刊)
[IJRR-25] On the Learning-based Control of Continuum Robots with Provable Robustness, Efficiency, and Generalizability, The International Journal of Robotics Research (IJRR), 2025. (机器人三大顶刊)
[IJRR-24] Behavior-Predefined Adaptive Control for Heterogeneous Continuum Robots, The International Journal of Robotics Research (IJRR), 2024. (机器人三大顶刊,中大首篇)
[TRO-15] Accuracy Quantification and Improvement of Serial Micropositioning Robots for In-Plane Motions, IEEE Transactions on Robotics (T-RO), 2015. (机器人三大顶刊)
[AUTO-25] Solving A Variety of Linear Time-Varying Systems of Equations with Prescribed Performance, Automatica, 2025. (控制领域顶刊)
[RSS-23] Predefined-Time Convergent Motion Control for Heterogeneous Continuum Robots, in Robotics: Science and Systems (RSS) XIX, Daegu, Republic of Korea, 2023. (机器人Top1顶会,中大首篇)
[BOOK-26] Neurodynamic Methods for Continuum Robot Control, ISBN: 978-1-394-40273-1, May 2026, Wiley-IEEE Press.
[RAL-26] Enhanced Soft Actuator with High Motion Potential and Multi-Drive Solutions via Bidirectional Motion and Reconfigurable Strategies, IEEE Robotics and Automation Letters, 2026.
[JFR-26] Single Master Bimanual Slaves Cooperative Teleoperation with Modified Damping Zeroing Neurodynamics, Journal of Field Robotics, 2026.
[JAS-26] Model-Free Variable Impedance Control of Redundant Manipulators for Soft Tissue Puncture, IEEE/CAA Journal of Automatica Sinica, 2026.
[TIE-25] Acceleration-Layer Robotic Control Based on Neural Dynamics, IEEE Transactions on Industrial Electronics, 2025.
[TMECH-25] Dexterity Online Optimization of Robotic Endoscopes Based on the Constrained Condition Number under RCM Constraints, IEEE/ASME Transactions on Mechatronics, 2025.
[TIE-25] Predefined-Time-Synchronized Whole-Body Control of Velocity-Controlled Mobile Manipulators With Unknown Kinematics, IEEE Transactions on Industrial Electronics, 2025.
[TII-25] A Hybrid Neurodynamic Scheme for Bimanual Synchronized Tracking Control of Robotic Manipulators with Uncertain Kinematics, IEEE Transactions on Industrial Informatics, 2025.
[TETCI-25] Genetic-Algorithm-Optimized Fuzzy Zeroing Dynamics for Visual Servoing of Robot-Camera Systems Without Modeling and Calibration, IEEE Transactions on Emerging Topics in Computational Intelligence, 2025.
[CAAI-25] Distributed Formation Control for Heterogeneous Robot Systems Based on Competitive Mechanism, CAAI Transactions on Intelligence Technology, 2025.
[SMB-25] Leveraging Part-Based NeRF for Robot Self-Modeling and Control, SmartBot, 2025.
[IROS-25] Iterative Learning Motion Control of Continuum Robots Based on Neural Ordinary Differential Equations, in IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025.
[TSMCS-24] Multitarget Pursuit-Evasion Based on Distributed and Competitive Mechanisms, IEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024.
[TCDS-24] Unifying Obstacle Avoidance and Tracking Control of Redundant Manipulators Subject to Joint Constraints: A New Data-Driven Scheme, IEEE Transactions on Cognitive and Developmental Systems, 2024.
[TIE-24] Discrete Quad Neural Dynamics for Inverse-Free Control of Model-Unavailable Continuum Robots, IEEE Transactions on Industrial Electronics, 2024.
[ROBOT-25] 具身仿真器综述: 技术进展和未来展望,机器人, 2025.
[AAS-24] 基于大模型的具身智能系统综述,自动化学报, 2024. (入选知网高下载论文)
[AAS-24] 基于变参递归网络和递归最小二乘的连续体机器人控制,自动化学报, 2024.
[RAS-25] Model-Free Kinematic Control of Redundant Manipulators: A Passivity Perspective, Robotics and Autonomous Systems, 2025.
[RAS-25] A Competition-Based Scheme Using k-WTA Networks for Multi-Target Pursuit and Encirclement in Dynamic Environments, Robotics and Autonomous Systems, 2025.
[NEUNET-25] Liquid State Machine Gaussian Process, Neural Networks, 2025.
[ACIRA-25] GVI-SLAM: 3D Gaussian Splatting SLAM with An End-to-End Transformer VIO Frontend, in: 2025 International Conference on Advanced Computing and Intelligent Robotics Applications (ACIRA), Guangzhou, China, 2025. (Best Paper Award)
[IRAC-24] Causal Actions Recognition for Efficient Exploration in Robotic Reinforcement Learning, 2024 International Conference on Intelligent Robotics and Automatic Control (IRAC), Guangzhou, China, 2024. (Best Paper Nomination Award)
[TNNLS-23] Predefined-Time Convergent Kinematic Control of Robotic Manipulators with Unknown Models Based on Hybrid Neural Dynamics and Human Behaviors, IEEE Transactions on Neural Networks and Learning Systems, 2023.
[TII-23] Model-Free Synchronous Motion Generation of Multiple Heterogeneous Continuum Robots, IEEE Transactions on Industrial Informatics, 2023.
[TFS-23] A Fuzzy-Enhanced Robust DZNN Model for Future Multi-Constrained Nonlinear Optimization with Robotic Manipulator Control, IEEE Transactions on Fuzzy Systems, 2023.
[TIE-23] Cerebellum-Inspired Model-Free Tracking Control and Visual Servoing of a Rigid-Flexible Hybrid Robotic Endoscope with RCM Constraints, IEEE Transactions on Industrial Electronics, 2023.
[TMECH-23] Position-Based Visual Servo Control of Dual Robotic Arms with Unknown Kinematic Models: A Cerebellum-Inspired Approach, IEEE/ASME Transactions on Mechatronics, 2023.
[TCYB-23] Uncalibrated and Unmodeled Image-Based Visual Servoing of Robot Manipulators Using Recurrent Neural Networks, IEEE Transactions on Cybernetics, 2023.
[ROBIO-22] A Competition-Based Distributed Scheme for Solving Multi-Robot Cooperative Pursuit Problems, in: IEEE International Conference on Robotics and Biomimetics (ROBIO), Xishuangbanna, China, 2022. (Robotica Best Paper Finalist)
[EAAI-22] “Comparative Studies and Performance Analysis on Neural-Dynamics-Driven Control of Redundant Robot Manipulators with Unknown Models, Engineering Applications of Artificial Intelligence, 2022.
[TIE-22] Towards Unified Adaptive Teleoperation Based on Damping ZNN for Robotic Manipulators with Unknown Kinematics, IEEE Transactions on Industrial Electronics, 2022.
[TII-23] Data-Driven Control of Continuum Robots Based on Discrete Recurrent Neural Networks, IEEE Transactions on Industrial Informatics, 2023.
[TII-23] A Novel Discretized ZNN Model for Velocity Layer Weighted Multicriteria Optimization of Robotic Manipulators with Multiple Constraints, IEEE Transactions on Industrial Informatics, 2023.
[NEUNET-22] Recurrent Neural Networks as Kinematics Estimator and Controller for Redundant Manipulators Subject to Physical Constraints, Neural Networks, 2022
[JAS-22] A New Noise-Tolerant Dual-Neural-Network Scheme for Robust Kinematic Control of Robotic Arms with Unknown Models, IEEE/CAA Journal of Automatica Sinica, 2022
[TIM-22] New Varying-Parameter Recursive Neural Networks for Model-Free Kinematic Control of Redundant Manipulators with Limited Measurements, IEEE Transactions on Instrumentation and Measurement, 2022.
[TFS-22] A Dual Fuzzy-Enhanced Neurodynamic Scheme for Model-Less Kinematic Control of Redundant and Hyper-Redundant Robots, IEEE Transactions on Fuzzy Systems, 2022.
[TII-22] A Discrete Model-Free Scheme for Fault Tolerant Tracking Control of Redundant Manipulators, IEEE Transactions on Industrial Informatics, 2022.
[TCDS-22] A Cerebellum-Inspired Network Model and Learning Approaches for Solving Kinematic Tracking Control of Redundant Manipulators, IEEE Transactions on Cognitive and Developmental Systems, 2022.
[ISAS-20] Neural-Network-Based Control of Wheeled Mobile Manipulators with Unknown Kinematic Models, The 4rd International Symposium on Autonomous Systems (ISAS), Guangzhou, China, 2020. (Best Paper Award)
[NEUNET-20] Model-Free Motion Control of Continuum Robots Based on a Zeroing Neurodynamic Approach, Neural Networks, vol. 133, no. 2021, pp. 21-31, 2020.
[TASE-19] Pose Characterization and Analysis of Soft Continuum Robots With Modeling Uncertainties Based on Interval Arithmetic, IEEE Transactions on Automation Science and Engineering, 2019.
[MMT-18] Design, Characterization and Applications of a Novel Soft Actuator Driven by Flexible Shafts, Mechanism and Machine Theory, vol. 122, pp. 197-218, 2018.
[BOOK-16] Calibration of Micro-nanopositioning Robots, LAP LAMBERT Academic Publishing, 2016.
[AIC-16] Toward a Framework for Robot-inclusive Environments, Automation in Construction, vol. 69, pp. 68-78, 2016.
[RAL-16] Compressive Sensing-Based Metrology for Micropositioning Stages Characterization, IEEE Robotics and Automation Letters, 2016.
[ICRA-14] Characterization and compensation of XY micropositioning robots using vision and pseudo-periodic encoded patterns, in IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, China, 2014.
[ICRA-13] Calibration of single-axis nanopositioning cell subjected to thermal disturbance, in IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, Germany, 2013.


